dynamic braking is type of rheostatic braking . With the help of dynamic braking we can control the speed of motor and reverse the direction. If we disconnect the small size motor from the supply then that motor will stops easily but in case of large size motor it can take some time to stop due to rotating inertia. In case of dynamic braking we apply opposite torque on the motor and that phenomenon is known as dynamic braking.
Circuit diagram of dynamic braking

in above diagram separately excited DC generator is connected with supply voltage (Vs). Field winding (Vf) is connected separately from armature winding. This type of connection is showing motoring mode. Now we modify the circuit and we will check how does dynamic braking performs and stops the motor speed.
Supply disconnected from armature circuit and short circuited by rheostat
")
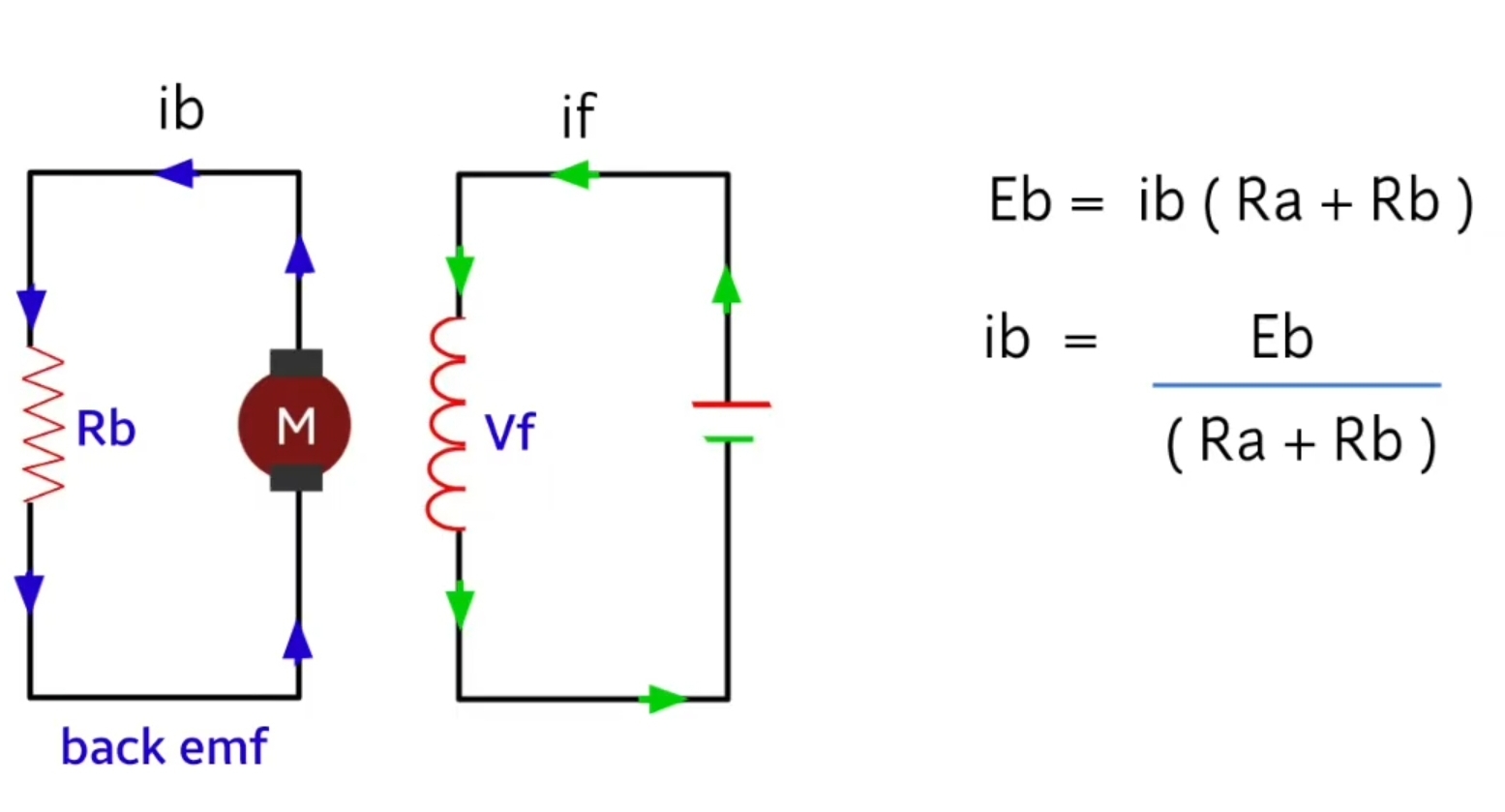
as you can see in above diagram we have disconnected the armature winding from the supply and a rheostat is connected. so after disconnecting the armature winding from supply rotor still rotates due to their inertia. When it disconnected from the supply and their rotor still rotates so here generator action performs and EMF generate in the armature winding. That generated EMF is called back EMF . What is back EMF you have already learnt in the working principle of DC motor.
here are measure winding is called circuit by the variable resistor or we can say here a complete part is available for circulating the current so due to back EMF here armature current starts to flow that will discharge across the resistor in the form of heat , and in this condition due to reversal of current opposite direction of torque will act on router. At this time flux in field winding remain constant. So due to opposite talk apply on the rotating armature armature quickly get a stops.
Equation of breaking current , Eb = ib( Ra + Rb )
ib = Eb/(Ra + Rb)
Rb – variable resistor

when value of (Rb) decreases then braking current (ib) increases mean opposite torque on rotor will increases so we can control the breaking by controlling rheostat. Drawback of this type braking is current discharge in the form of heat that reduce the life.
how does dynamic braking applied braking torque in induction motor
one terminal of three phase induction motor is connected with another terminal , if we have three input wire red , blue and green so suppose red input wire first disconnected from the supply and connected to Blue input wire. Due to this changes rotating magnetic field rmf that was producing in the air gap of rotor and a stator of three phase induction motor that will now convert in the pulsating magnetic field.
Pulsating field have positive and negative half cycle so during positive half cycle of AC current , direction of torque on rotor is clockwise direction and during negative half cycle of AC supply direction of torque on rotor is anticlockwise direction. Where negative where negative torque remain greater than positive that’s why motor get stops.
in this type of braking the main role of back EMF that produces due to generator action, when we disconnected the motor from the supply then their rotor continue rotates due to inertia , at that time generator action performs and EMF induces in the armature winding and current circulates due to complete circuit with the help of variable resistor. And that induced current in the circuit dissipated across the variable resistor in the form of heat.
dynamic braking performs by four Different techniques
- DC dynamic braking
- AC dynamic braking
- self excited dynamic braking
- Zero sequence dynamic braking
In this article we have learnt about DC dynamic braking and basic about AC dynamic braking that how we can control three phase induction motor by the help of dynamic braking.